5s
+1
Submission successful!





Cooling Method: Air Cooling
Classification Of Degrees: IP54
Rated Power: 10kW
Blade Material: Aluminium Alloy
Type: Wind Power Generator
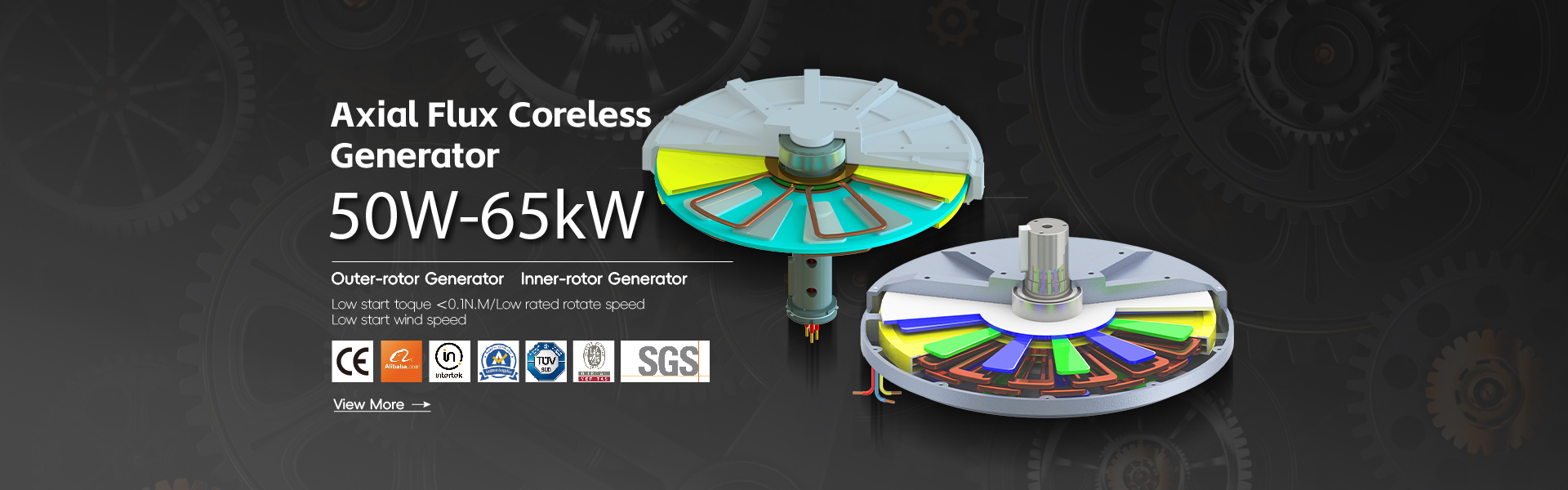
Rated Power: 300w-30kw
Start Torque: <0.3N.M
Rated Working Voltage: DC400V/DC240V
Rated Wind Speed: 11.5 M/s
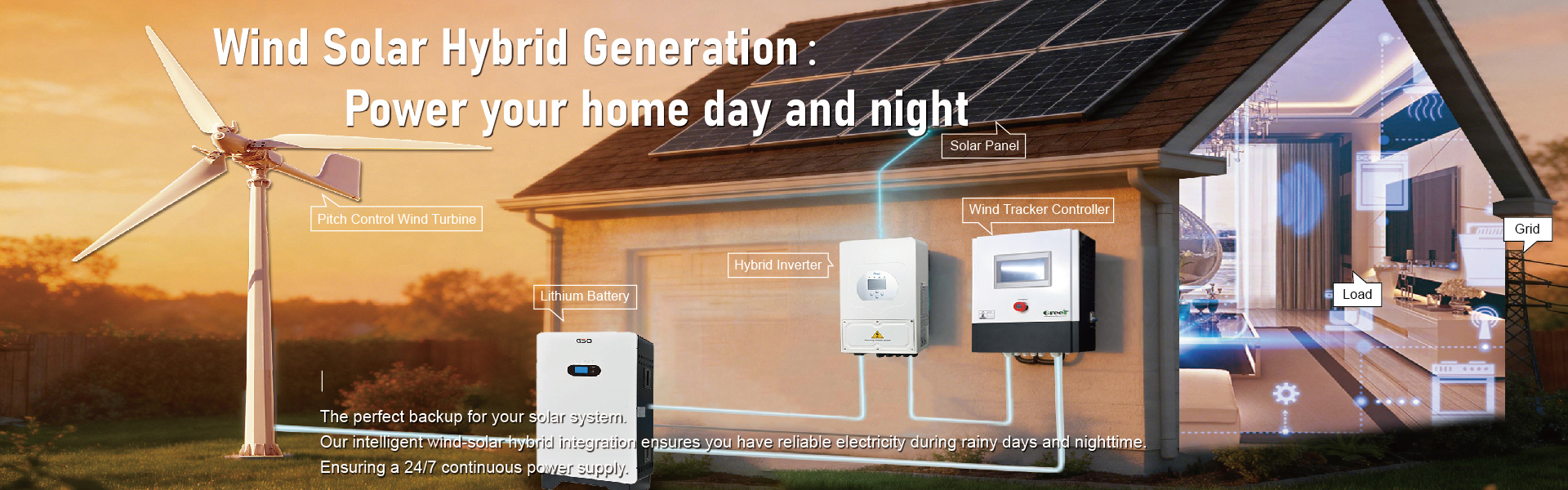
Productname: Hybrid Convertor
Rated Power(kW): 100kw/150kw/200kw/250kw/300kw/500kw/600kw/700kw/800kw/1000kw
Output Frequency: 50 Hz / 60 Hz


 english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski


